Stuck Value Fault
Define Fault
A stuck value fault models a sensor error in which readings become constant for a period of time, effectively freezing the output at a fixed value. Unlike offset faults, which introduce an additive bias, stuck value faults replace the sensor signal entirely with a constant.
Stuck value faults can arise from hardware malfunctions, software errors, or sensor saturation. Let \(c\) denote the constant value to which the sensor output is fixed during the fault interval.
The stuck value may be specified directly or generated relative to the underlying signal. For example, \(c\) may be defined as
where
and \(d \in \mathbb{R}\) is a user-defined scaling factor.
Math Behind Fault
Assume a univariate time series of true sensor values:
True signal: \(x_i\), for index \(i = 0, 1, 2, \ldots, N-1\)
Fault start index: \(s\)
Fault end index: \(e\)
Linear Stuck Value Model
The observed (faulty) signal \(y_i\) is defined as:
This represents the sensor output being fixed at \(c\) during the fault window.
Key Takeaway
Stuck value faults freeze sensor outputs, shifting the mean toward the stuck value and typically reducing variance.
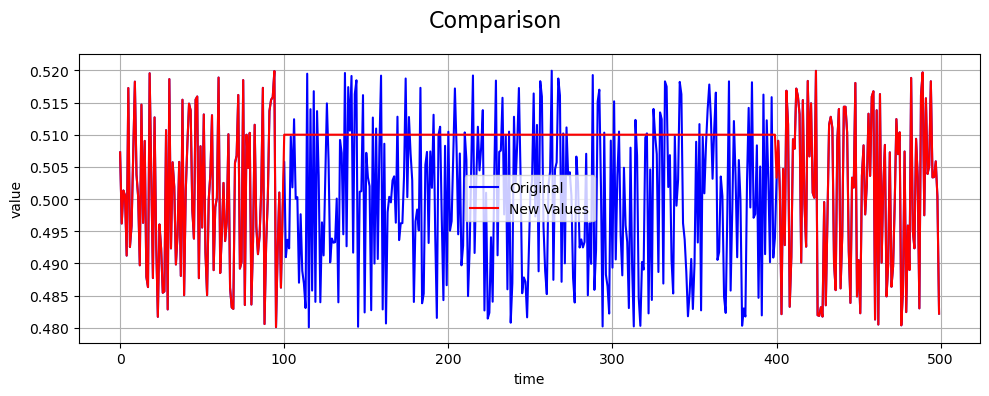
Example
An example of a stuck value fault compared to the true values is shown below: