Uniform Noise Fault
Define Fault
A uniform noise fault models a sensor degradation in which measurements are corrupted by random noise drawn from a uniform distribution. Unlike normal (Gaussian) noise, uniform noise introduces equally likely fluctuations within a bounded range.
Uniform noise faults can arise from quantization effects, sensor resolution limits, or low-level interference.
Let \(\epsilon_i \sim \mathcal{U}(a, b)\) denote the additive noise applied during the fault interval. By default, the bounds \(a\) and \(b\) are defined relative to the signal scale as
where
Math Behind Fault
Assume a univariate time series of true sensor values:
True signal: \(x_i\), for index \(i = 0, 1, 2, \ldots, N-1\)
Fault start index: \(s\)
Fault end index: \(e\)
Linear Uniform Noise Model
The observed (faulty) signal \(y_i\) is defined as:
where \(\epsilon_i\) is independently sampled from the uniform distribution \(U(a, b)\).
Key Takeaway
Uniform noise faults degrade signal quality by increasing randomness while preserving the mean.
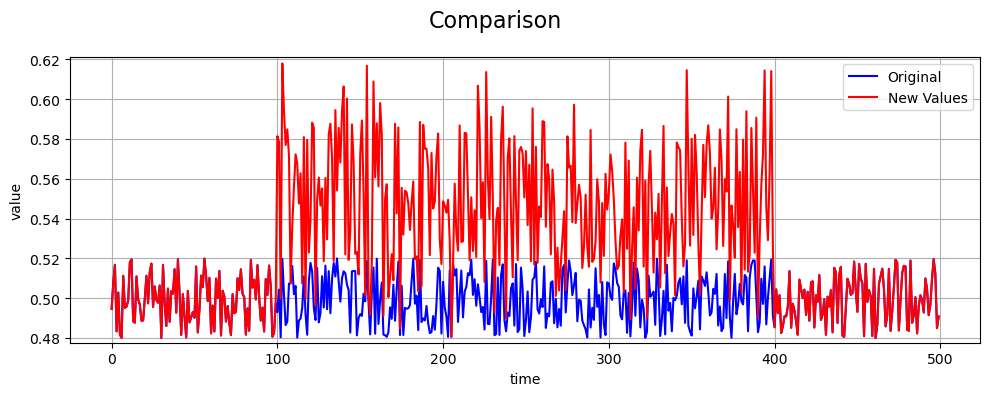
Example
An example of a uniform noise fault compared to the true values is shown below:
References
NumPy uniform random generator: https://numpy.org/doc/stable/reference/random/generated/numpy.random.uniform.html